Das Computer Vision and Machine Perception Lab an der Technischen Universität Nürnberg konzentriert sich auf 3D-Computer Vision und lebenslanges Lernen. Der Schwerpunkt liegt auf der Entwicklung von maschinellen Wahrnehmungsalgorithmen , die nicht starr sind, sondern sich an ihre Umgebung anpassen und sich weiterentwickeln können. Das Lab ist mit den umliegenden interdisziplinären Bereichen verbunden, wie z.B. Grundlagen, Reinforcement Learning, Verarbeitung natürlicher Sprache und Datenschutz. Das Labor wird von Prof. Dr. Eddy Ilg geleitet, der für seine Beiträge zu Computer Vision im Bereich Optical Flow und seine Arbeit an AR-Technologie bei Meta bekannt ist.
Team Computer Vision and Machine Perception Lab








News
| 1.10.2024 | Das CVMP Lab wechselt an die Technische Universität Nürnberg. |
| 23.8.2024 | Eddy Ilg erhält eine ordentliche Professur an der UTN. |
| 11.7.2024 | Zwei unserer Paper wurden für die ECCV 2024 angenommen: latentSplat and iNeMo: Incremental Neural Mesh Models for Robust Class-Incremental Learning. |
| 6.5.2024 | Eddy Ilg wird Area Chair für NeurIPS. |
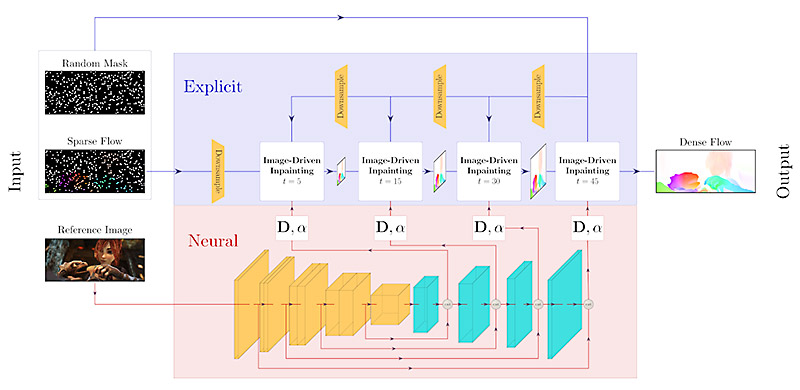
| 3.5.2024 | Unser Paper Neuroexplicit Diffusion Models for Inpainting of Optical Flow Fields wurde bei ICML angenommen. |
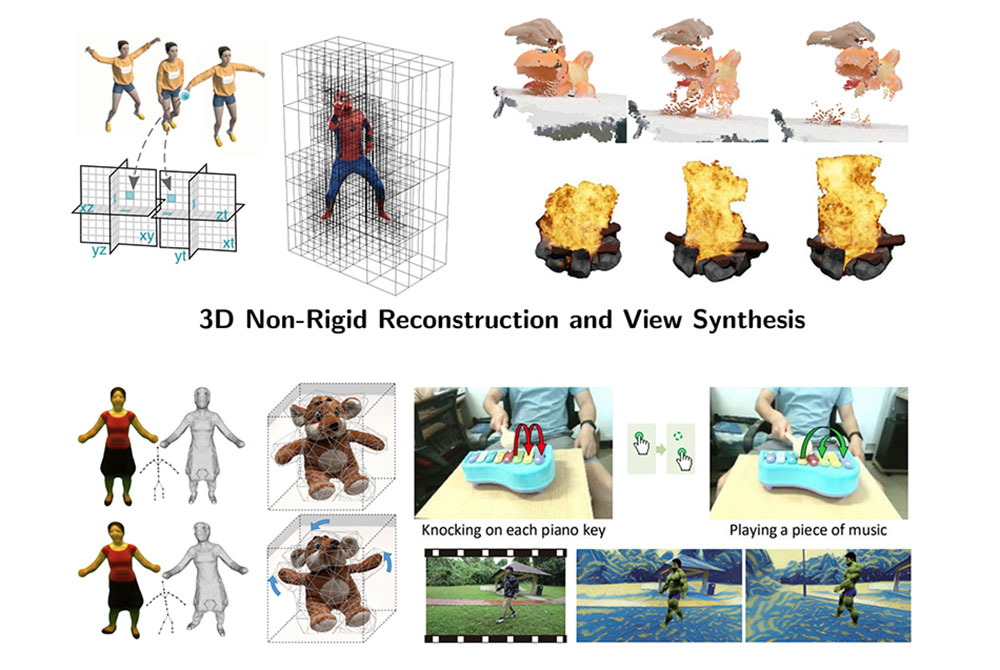
| 25.3.2024 | Unser State-of-the-Art-Bericht über Recent Trends in 3D Reconstruction of General Non-Rigid Scenes wurde auf dem Eurographics (STAR) und Computer Graphics Forum 2024 angenommen. |
| 20.3.2024 | Vier unserer Arbeiten wurden zur CVPR 2024 angenommen: Neural Point Cloud Diffusion for Disentangled 3D Shape and Appearance Generation, Neural Parametric Gaussians for Non-Rigid Reconstruction, Unsupervised Learning of Category-Level 3D Pose from Object-Centric Videos, and Accurate Training Data for Occupancy Map Prediction in Automated Driving using Evidence Theory. |
Publikationen
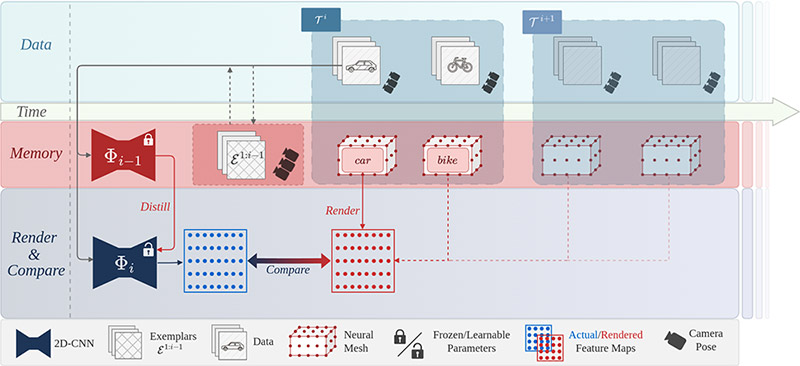
iNeMo: Incremental Neural Mesh Models for Robust Class-Incremental Learning (ECCV 2024)
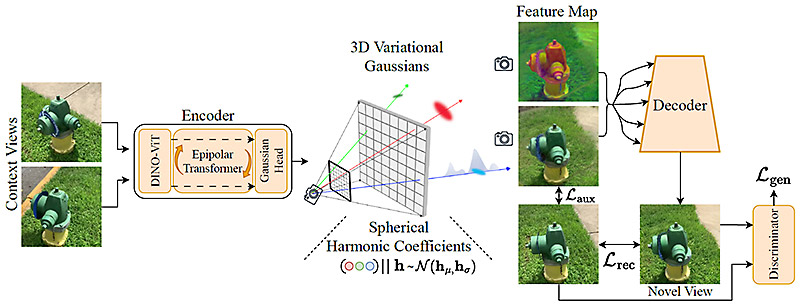
latentSplat: Autoencoding Variational Gaussians for Fast Generalizable 3D Reconstruction (ECCV 2024)
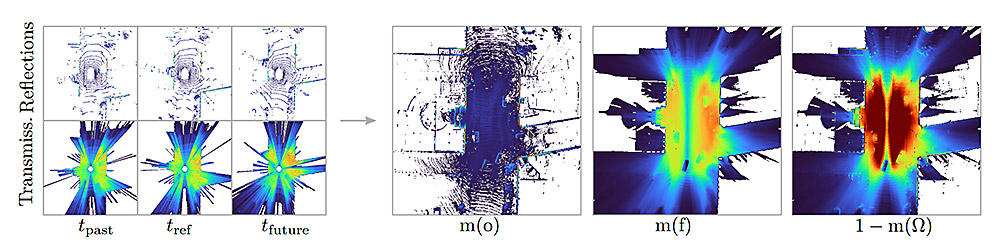
Accurate Training Data for Occupancy Map Prediction in Automated Driving Using Evidence Theory (CVPR 2024)
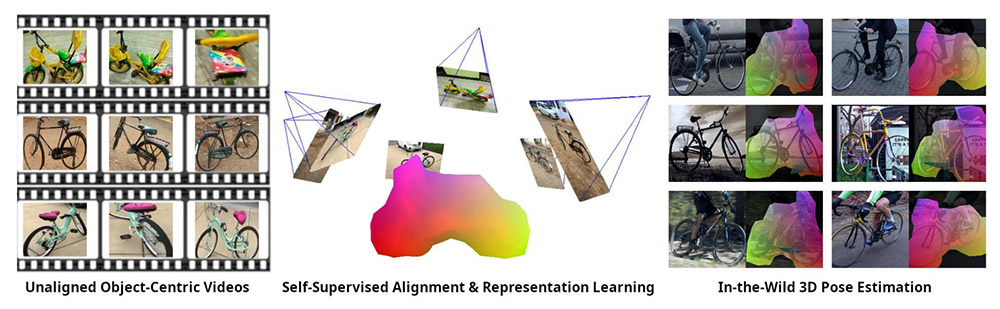
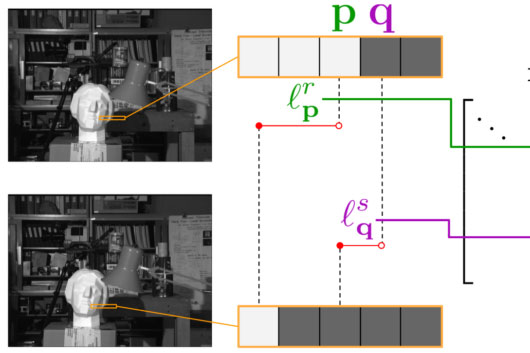
Unsupervised Learning of Category-Level 3D Pose from Object-Centric Videos (CVPR 2024)
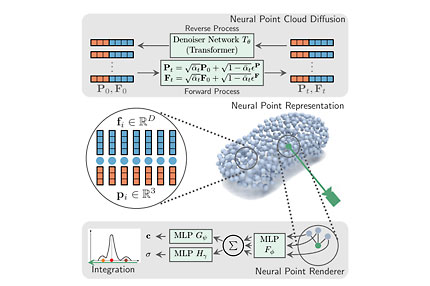
Neural Point Cloud Diffusion for Disentangled 3D Shape and Appearance Generation (CVPR 2024)
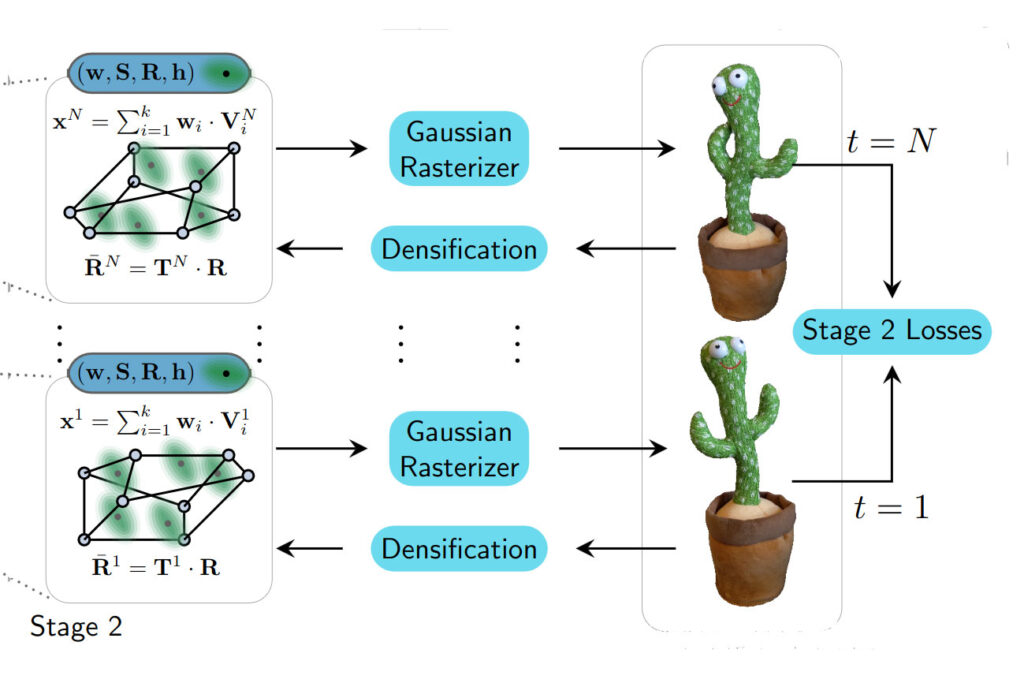
Neural Parametric Gaussians for Monocular Non-Rigid Object Reconstruction (CVPR 2024)